Author: Robert Richardson
Published: 01/03/2020
https://www.realrobotics.co.uk/2020/03/01/the-djedi-project-part-2/
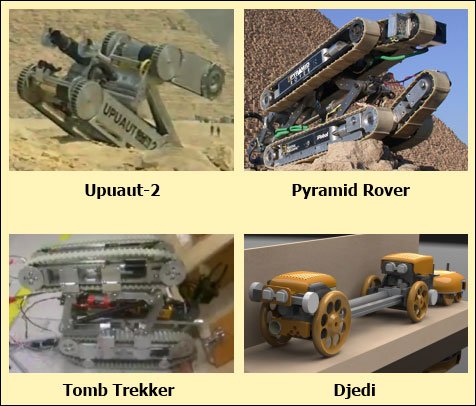
The Djedi robot won the competition with Tomb Trekker for a number of reasons, but ultimately the Leeds team was selected because Djedi represented the next generation of robotics while Trekker was stuck spinning its treads the old way. If you peel the labels off, you might have a hard time distinguishing Trekker from Upuaut-2 and Pyramid Rover. But Djedi is a whole new design, from the tools it carries to the way it carries them. “Djedi has been custom-built from scratch to do this specific job,” explained Shaun Whitehead, “and to do it as well as possible while protecting the pyramid.”
This is not to say that the Djedi team did not learn from the previous missions. Both Upuaut-2 and Pyramid Rover had provided useful reconnaissance from QCN and QCS and gave the engineers from Leeds an idea of the challenges they were facing. But part of the lesson came from learning what they did not want to reproduce in the robot. Shaun Whitehead continues:
I always like to look at previous design solutions to challenges and see what we can learn from them. In this case, there wasn’t much to be learned apart from the fact that I did not want to use a tracked robot. However, we did use the findings of both robots to find out what challenges we might face in terms of inclinations, bends, steps, block thicknesses, etc., and have used those to drive the specification of our robot.
(Interview with Shaun Whitehead)
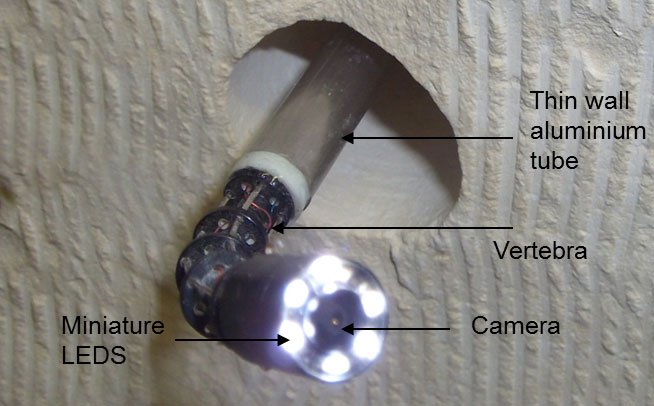
One of several improvements was the camera and lighting array. For Djedi, the team used a miniature “micro snake” camera that was designed by Scoutek. This camera uses a wide-angle lens surrounded by six high-intensity LEDs for optimum light. Mounted on a snake-like appendage that uses miniature servos to operate its mechanical muscles and tendons, Djedi’s camera is capable of a full 360 degrees of motion (+/- 180 degrees pitch and yaw). With a diameter of less than 8 mm, the snake-cam easily fits through the existing hole in the blocking slab.
Another improvement was in the size and technology of the impact-echo probe used to measure the thickness of the blocks in the shaft. As we have noted, the probe used by Rover required a surface area nearly equal to half that of the blocking slab. Rover also benefitted from the fact that the first blocking slab has a smooth, finished surface. But the second blocking stone in QCS has a rough surface and lies 18 cm away, on the other side of a 2 cm hole.
The sonic surveyor designed for Djedi was a collaborative effort and an example of what Shaun calls creationeering – the fusion of creativity and engineering. Ron Grieve and Shaun Whitehead both had expertise in micro-technology—Ron with creating micro-transducers capable of measuring stone up to 15 meters thick, and Shaun with fashioning beetle microbots that carry sensors into very tight spaces. The Leeds team was adept at creating mobile robotic platforms to carry these tools past a multitude of obstacles, and Dassault Systèmes had the powerful software and 3D technology to analyze the data and model it in virtual reality.
The Djedi Project was a perfect alchemy of talented individuals presented with difficult but enjoyable challenges, and all the right tools and resources to innovate. One of the most observable ways that Djedi was an evolutionary leap beyond Upuaut-2, Pyramid Rover, and Tomb Trekker, however, was in its mobility system. All three previous crawlers had employed rubber tread belts that looped over two or more motorized drive wheels. The belts provided the traction while the wheels provided the force that moved them. This type of propulsion is called continuous track, or caterpillar mobility.
Caterpillar mobility is designed to maximize traction by distributing the weight of the vehicle over its entire length, and usually the vehicle’s weight helps increase traction. But in the pyramid shafts, gravity is not your friend. QCS has an average ascent of 39.6 degrees, while QCN averages around 36.7 degrees. In this environment the weight of the vehicle does not provide sufficient traction to grip the floors—the crawlers have to be wedged into the shafts or they slide back down. Upuaut-2, Rover, and Trekker all addressed this problem with over-and-under-mounted treads and chassis that could expand upward.

The upward-expanding chassis wedged the robots between the floor and ceiling of the shaft, allowing the top and bottom treads to crawl along both surfaces. This mitigated the downward pull of the slope, but created problems of its own. The pressure created by the expanded chassis could result in the metal drive wheels exerting force directly onto the limestone surfaces. In fact, the serrated wheels of Upuaut-2 appear specifically designed to bite into the shafts for traction.
Djedi’s designers understood that minimizing the weight of the crawler would reduce the amount of force needed for traction and propulsion, and less force meant that the robot was not as likely to damage the shafts. Rather than something that looks like a bulky WWII tank, the Djedi team came up with a new model that benefitted from their collective experience in aerospace and terrestrial robotic navigation, but which also somewhat resembled a relic of Waynman Dixon’s era – the adjustable roller skate.
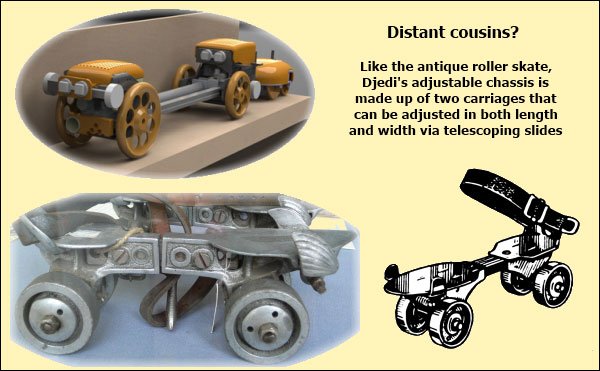
Antique roller skates had a design that allowed their length and width to be adjusted. They were made up of two carriages, each mounted over a pair of wheels, connected by an adjustable central rod that controlled the length of the skate. The width was controlled by two sliding braces that extended from the sides of the front carriage.
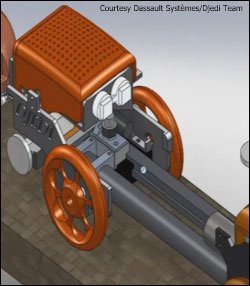
Like the skate, Djedi’s chassis is also comprised of two carriages, each mounted over a pair of wheels, connect by a pair of sliding rods that control the length of the crawler. Analogous to the side braces on the front of the skate, Djedi has extendable rods on the sides of both carriages, with a fifth rod that extends from the top of the front carriage. Called bracing actuators, these rods control the width of the chassis, but whereas the side braces on the skate apply inward pressure for a snug fit around a foot, Djedi’s bracing actuators apply outward pressure to hold the crawler in place in the pyramid shafts.
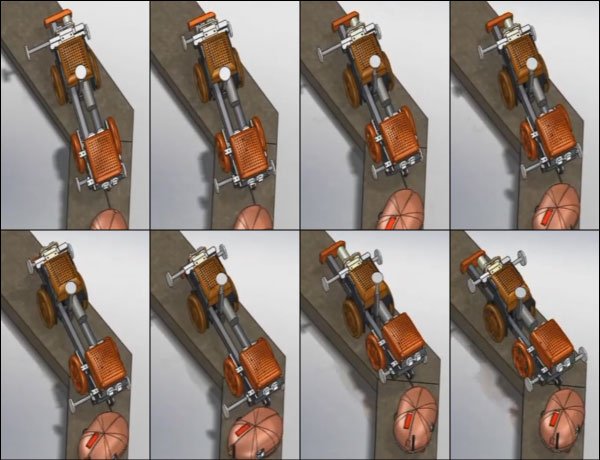
Djedi’s mode of mobility is similar to that of an inchworm. When an inchworm is stretched out to its full length, it moves by grasping with its front legs and contracting its body to pull its hind legs forward. Once it reaches its shortest length, it grabs with its hind legs and pushes the front part of its body forward by stretching out. Once again at full length, the inchworm grabs with its front legs, turns loose with its hind legs, and contracts again. By repeating this series of motions it “inches” its way toward its destination.
Djedi inches along in a similar way. When the crawler’s chassis is stretched out to its full length, the front carriage grabs the surfaces of the shaft by extending its bracing actuators. The tips of the actuators have thick pads that protect the shaft surfaces from damage while providing the necessary traction to pull the back of the crawler forward. The actuators in the rear carriage are in the retracted position, which leaves the back of the crawler free to move. Djedi contracts its chassis by pulling the central connecting rods forward, moving the rear carriage up the shaft.
Once Djedi is in its contracted (shortest) position, it extends the bracing actuators in the rear carriage which then locks the back of the crawler in place, just like the inchworm grasping with its hind legs. Djedi then withdraws the actuators in the front carriage, leaving the front end of the crawler free to move. Now traction has been transferred from the front carriage to the back carriage. The robot then expands its chassis by pushing the central connecting rods forward, moving the front carriage further up the shaft. Once at full length, the front carriage extends its actuators, transferring the traction back to the front of the crawler, and the process begins again, thus “inching” Djedi up the shaft.
With this type of mobility, Djedi protects the shaft surfaces by containing the force almost entirely to the central connecting rods, rather than to a set of metal drive wheels that might accidentally—or by design—transfer both force and traction directly to the limestone surfaces. Unlike the drive wheels in the caterpillar systems, Djedi’s wheels are not motorized, they are light weight and free rolling. The protective padding on the actuator feet can be thicker than a tread belt because the belt has to be thin enough to move with the drive wheels. As Dr. Richardson explains:
[The] Djedi robot climbs the shaft walls using soft pads on its ‘feet’ that grip but leave no trace. This is in complete contrast to other climbing robots that rely on tracks to move upwards on sloping surfaces, leaving scuff marks in their wake.”


For any crawler to move within the pyramid shafts, they have to apply both traction and force to the surfaces. But using a motorized set of telescoping connector rods to provide movement rather than multiple motorized drive wheels keeps weight to a minimum and applies force in the direction of least resistance. Whereas a track system can be left spinning and biting into the surfaces to surmount a step, Djedi’s fixed-point actuators keep traction at a constant, allowing the carriages to be pulled or pushed over steps with ease.