Author: Robert Richardson
Published: 02/03/2020
https://www.realrobotics.co.uk/2020/03/02/the-djedi-project-part-1/
The Djedi Project is not just the new mission to explore the pyramid shafts – it truly is the next generation in robotic archaeology. Beginning with Waynman Dixon’s iron rods, researchers have been probing the Great Pyramid’s mysterious claustrophobic passageways for 140 years. But now, using technology designed for uses as divergent as space exploration and terrestrial search and rescue, we are finally able to explore the chamber behind Gantenbrink’s Door.
This case study covers how the Djedi Team won the “Robot Olympics in the Desert”, the members who make up the team, the specifics of the robot’s design, and the results of Djedi’s maiden voyage up QCS and into the chamber behind the first blocking stone. Through interviews and exchanges with the Djedi Project manager, Shaun Whitehead, as well as other team members, this article promises to be the resource for the published Djedi material to date.
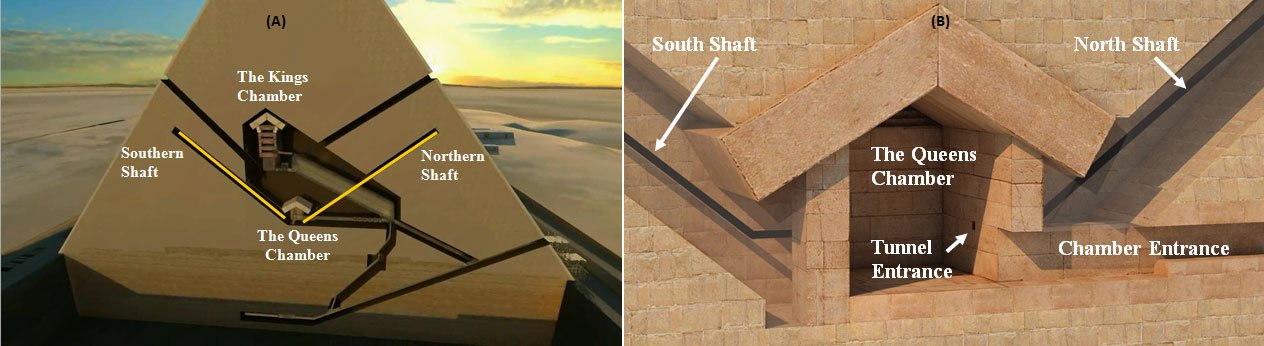
Pyramid Rover was a successful reconnaissance mission into the southern shaft coming out of the Queen’s Chamber (QCS). The mission had confirmed that the 20 x 20 cm blocking slab and the final section of U-block were made of a higher quality type of limestone than the rest of the shaft, most likely the fine limestone quarried at Tura rather than the rougher local yellow limestone. The blocking slab and final U-block were also smoother and of higher craftsmanship than the rest of the shaft blocks. The Rover mission also confirmed that the blocking slab was affixed with two copper pins that were bent downward at a 90-degree angle.
Regarding the white circular patches observable behind the pins, Pyramid Rover’s close-up analysis revealed that these were most likely mortar patches rather than royal seals, one of the possibilities offered up by the Upuaut Project. Rover’s impact-echo probe had shown that the blocking slab was only 5-9 cm thick, which placed it within the capabilities of Rover’s drill and probe-mounted camera.

Rover successfully drilled a small hole in the slab, about 2 cm in diameter, while inflicting as little damage as possible. The probe-mounted fiber optic camera was successfully deployed and gave us our first look behind Gantenbrink’s Door. What the Pyramid Rover team discovered was a small chamber formed by the Tura limestone U-block, the basal stone, the blocking slab/door, and a rough block of the local limestone on the opposite side, about 19 cm away from the “door.”
But the probe camera had its limitations. It was fixed inside a rigid tube and had no tilt or pan capabilities—all it could do was look straight ahead. The LED array on the probe did not provide much ambient light, so Rover was unable to examine the walls and floor of the chamber, much less the back of the blocking slab. Even the view of the opposite block was limited by the quality of the light. With the center being overly reflective and the periphery fading into darkness, details were hard to make out. What appeared to be cracks could just as easily be tool marks, mason’s lines, flaking, or just shadows.

Larger, more structural questions presented themselves as well. Was the opposing block another blocking slab/door? Did the shaft continue on the opposite side, or come to an abrupt end against the core masonry of the pyramid? Was the block inserted into the shaft like a cork, or did it sit flush against the end of the shaft like a lid?
The Pyramid Rover had also made a remarkable discovery in the northern shaft of the Queen’s Chamber —another door, nearly identical to the one Gantenbrink discovered, and at about the same elevation. The QCN door also had copper pins and also appeared to be made of the higher-quality limestone and exhibited superior workmanship. Could there be another chamber in QCN?
To even begin assessing these questions would require another mission and another robot. But this meant asking new questions. Who should design the next robot? How could they improve on the previous missions? What would be the scope of the project? Zahi Hawass, the Secretary of the Supreme Council of Antiquities, had some decisions to make.
Initial planning for the next mission into the Queen’s Chamber shafts began soon after the conclusion of the Pyramid Rover Project, and at one point it seemed that a team from Singapore University had been selected as early as August, 2004. Speaking with Chinese reporters at that time, Dr. Hawass talked as if the Singaporean mission was a done deal. “The manufacturing of the robot will start in October,” Hawass said, “with the university [of Singapore] footing the bill. The exploration will likely start next year” (People’s Daily Online, New robot to uncover pyramid mysteries, August 12, 2004).
By mid October, 2005, the Singaporean project, called Tomb Trekker, appeared to be on schedule. According to The Independent, Singapore University had been working on Tomb Trekker for two years and Dr. Hawass would be inspecting the robot within a week (The Independent, Robot to explore Great Pyramid’s secret chamber, by Anne Penketh, October 12, 2005). But apparently he was not entirely convinced with what he saw and decided to open the project up to competition. In 2006 and 2007 Tomb Trekker would have to face off with a competing team from Leeds University for the right to explore the pyramid shafts.
The next mission into the Queen’s Chamber shafts would have two primary objectives:
To accomplish these objectives, the mission would have to meet certain criteria as well. The tube-mounted camera on Pyramid Rover was unable to look around the inside of the chamber and the light quality was not fully up to task. The next robot would need to be able to look up and down and from side to side, as well as take a look at the back of the blocking slab. One of the most curious features of the shafts is the copper pins in the two blocking slabs. To have a better understanding of these pins the new robot would need to be able to examine the backs of these slabs.
Another consideration would be scale. The impact-echo probe used by Pyramid Rover covered nearly half the surface area of the blocking slab. Obviously, something of comparable size would not be able to fit through the hole in the first blocking slab, and minimizing damage meant the team could not drill a larger hole. The next mission would have to employ a probe that could fit through the tiny hole already made by Rover.
Damage prevention was not just a consideration with the blocking slab, it had become one of the main criteria of the mission. The tank-like treads used by Upuaut-2 and Pyramid Rover had left scuff marks on the shafts. There is an old adage that cave explorers use—take only pictures, leave only footprints. But the pyramid shafts are a different type of spelunking and the Supreme Council of Antiquities was determined that whoever they selected for the next mission would leave no footprints at all.
To select which team—Singapore or Leeds—was best able to fulfill the mission and meet all the criteria, Zahi Hawass arranged for the two sides to face off in a sort of robot Olympics in the desert. The SCA had a group of Egyptologists and engineers from Cairo University design a limestone “competition tunnel” in the desert that mimicked the actual pyramid shafts as nearly as possible in terms of size, slope, and conditions. The panel of judges was an impressive list of experts. According to the Official Report of the mission findings:
The trials were supervised and witnessed by a team that included a group from the Faculty of Engineering at Cairo University; Dr. Ali Radwan, a professor of Egyptology at Cairo University; Dr. Sabri Abdel Aziz, Head of the Pharaonic Sector of the SCA; and Mr. Hisham El Leithy from the SCA. (Hawass, Whitehead, et. al, p. 206)
The competition was exciting, but not without some anxiety for both sides. For the Singapore team it meant defending a concession to do the work which they had thought had already been won back in 2004. For the Leeds team it meant testing an entirely new crawler design against one that had held up fairly well with Upuaut and Rover. Dr. TC Ng, one of the members of the Leeds team, describes the moment:
While our team’s rover was doing the test and we were sweating like Indiana Jones under the Egyptian sun, a dozen disciplined Singaporean engineers marched in like soldiers with identical T-shirts. They seemed good…Their robot was brilliant and exceptionally well made (South China Morning Post, Dentist digs deep to discover Giza secret, by Adrian Wan, September 28, 2010).

Both robots were equipped with the tools they would need to achieve the mission goals, but in the end one particular criterion set the Leeds robot above Trekker. Tomb Trekker had relied on the same type of over-and-under tread system that had propelled Upuaut-2 and Pyramid Rover, which uses pressure against the floor and ceiling of the shaft to hold the robot in place. But this is also the same design that had damaged the pyramid shafts. At the end of the competition, under the guidance of the star panel he had assembled, Dr. Hawass pronounced the Leeds team the victors.
The Leeds robot had proved that innovation and evolution sometimes prevail over convention and tradition, these latter two often being the bread and butter of Egyptology. But the emerging field of robot archaeology was about to make a quantum leap from crawlers that looked like something from a WWII battlefield to a sleek new design that would be at home on a space exploration mission. And as we shall see, that was no coincidence.
Before we get into the details of Djedi’s design and the results of its maiden voyage, let’s take some time to get to know the Leeds team and how they came together.
On pronouncing the Leeds team the victors, Dr. Hawass dubbed the mission robot Djedi, after the magician Pharaoh Khufu attempted to trick into showing him the secrets of the Sanctuary of Thoth. It was now the mission of the Djedi team to tease out the secrets of the shafts in Khufu’s pyramid, and in doing so maybe learn more about how the pyramid was built. The team itself was composed of modern magi—scientists, engineers, and technicians from the top ranks of their respective fields.
The Djedi Team had its early genesis with the efforts of Dr. Ng “TC” Tze Chuen, who began dreaming of his own project to explore the Queen’s Chamber shafts when he saw the broadcast of Pyramid Rover’s first peek behind the blocking slab. Dr. Ng worked as a dentist in Hong Kong, but he had made his real mark designing precision tools for space exploration. TC Ng knew that a third mission into the Queen’s Chamber shafts was inevitable, and he believed that space exploration technology might offer the best solutions to many of the problems Pyramid Rover and Upuaut-2 had faced.
Dr. Ng tried to get the ball rolling by cold calling on the Supreme Council of Antiquities, attempting to convince Dr. Hawass to hear his proposal. At first his cold calls got him the cold shoulder. As he describes it:
Winning the operation rights for the third attempt took me more than a dozen trips knocking on the doors of SCA uninvited. It was a bitter experience in the early stage. I still remember being pushed out of the main gate of SCA for not having a valid appointment.
Hong Kong Dental Association Newsletter, (Second Door? by Dr. Ng Tze Chuen, November/December 2010. Pp. 30-1).
But persistence paid off, and after hearing TC’s proposal Dr. Hawass gave him the go-ahead to begin assembling a team. At first Dr. Ng attempted to work with the team he would eventually compete with—the University of Singapore. But when that relationship failed to thrive, he turned to a friend he had made while working on a Mars lander project, Shaun Whitehead.
Shaun was a respected inventor and the founder of Scoutek UK, a company specializing in robotic technology for space and terrestrial exploration. TC recalled Shaun’s drive and ability to generate enthusiasm for a project and knew that he was the ideal person for building the sort of interdisciplinary team that the Djedi Project would require. Whitehead was immediately taken with the project. “As soon as TC told me what he was trying to do,” he says, “I jumped at the opportunity.”
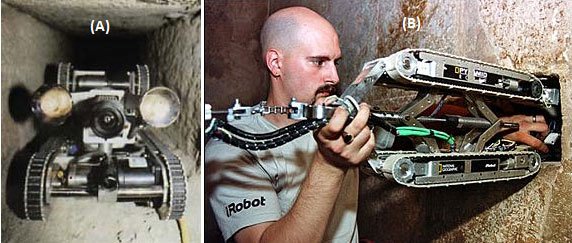
Shaun began looking for potential team members in the UK. He knew that the team would require a balance of academic and technical expertise, and an understanding of the conditions in which Djedi would have to perform. The robot would have to be small, but tough. As with space exploration, where every ounce counts, the crawler would need to be light enough to navigate the shafts without damaging them, delicate enough to enter and work behind the small hole in the blocking slab, and durable enough that it wouldn’t break down where it would be impossible to repair or retrieve.
The challenges of the Djedi project are very similar to space exploration. The rover has to be mass-optimized, to minimize damage to the shaft walls (higher weight = more brace force required for grip), and there also is very little opportunity for maintenance when the rover is deployed over sixty meters up into the shaft, just as we can’t repair space robots! So everything needs to work right first time. It’s a real “systems engineering” task, and consequently the robot is a lot more advanced than most people imagine.
(Em Hotep interview with Shaun Whitehead, January 8, 2012 )
He discovered that there was a small team at Manchester University that seemed to fit the bill. Dr. Robert Richardson, the Lecturer in Robotics at the School for Computer Science, was involved in a project to develop robots for urban search and rescue situations following natural disasters. The types of crawlers Dr. Richardson was working on were both rugged and dexterous. “Everything that’s in the building falls over, and most buildings tend to partially collapse,” he explains. “If you can’t interact with debris, you drive up and get stuck” (New Scientist, Mechanical mole could seek out disaster survivors, by Kurt Kleiner, September 17, 2007).
Shaun approached Dr. Richardson, who understood the mobility requirements for the pyramid shafts, and was happy to put himself and his team behind the project. Dr. Richardson had a highly skilled crew at Manchester who offered a wide range of experience and specialization. One was Stephen Rhodes, a computer science analyst for the Faculty of Engineering and Physical Sciences, and a gifted technician. Another was Andrew Pickering, who had been with the Manchester Robotics Group since 1994, and who had helped develop mobile robots that were designed to interact intelligently with their environment.
The team at Manchester was dedicated and they enjoyed working under Dr. Richardson, who Shaun describes as “very bright and very positive about the opportunity.” Most importantly, they worked well together. “I have great respect for the talent of those guys,” Whitehead continues. “I have rarely known them to be stumped by any mechanical or electronic challenges.” The team remained cohesive even after Dr Richardson moved to the University of Leeds, taking the project with him. With the addition of Adrian Hildred, a researcher who develops and tests cars for Bentley, Shaun had his UK team.
For its own part, the University of Leeds has tremendously benefitted from its involvement in the Djedi Project, which has been a training ground for several generations of engineering students. The enthusiasm, creativity, and commitment of these students have been vital to the project’s success, and Shaun particularly singled out the participation of Jason Liu and William Mayfield as “a particularly keen and hard-working pair who will stick with the project right to the end.”

From across the Atlantic, the team was joined by Ron Grieve, founder of the Canadian consultancy company Tekron and a trailblazer in the field of impact-echo testing. Ron had developed technology for assessing the conditions of buildings and other structures, and specialized in creating miniature sensors to monitor stress, movement, humidity, temperature and corrosion. His innovations included micro-transducers capable of taking measurements from the smallest and roughest surfaces, which made him the best choice for helping solve the problem of how to analyze the rough surface of the second block behind the chamber door.
Mr. Grieve passed away in late December, 2010, but his contribution to the team was immeasurable.
He was the “non-destructive testing” expert in the team, responsible for assessing the condition of the blocking stones. We developed the miniature “Sonic Surveyor” together. This device uses an acoustic wave to measure stone thickness where there is access to just one side. Ron was a very experienced member of the team, and was often called in to investigate things like bridge and power station failures. Most importantly, he was a very positive team-player and a very good friend. We miss him.
(Interview with Shaun Whitehead)
The team was rounded out with the addition of Mehdi Tayoubi, Richard Breitner, and Ben Willcocks from the French company Dassault Systèmes. Like Whitehead and Ng, Breitner had a background in aerospace technology, but readers may be most familiar with Mehdi and Richard from their work with Jean-Pierre Houdin on Project Khufu and Khufu Reborn Interactive. Using Dassault Systèmes’ scientific 3D/Virtual Reality software, CATIA, Project Khufu produced the most complete survey of the Great Pyramid in history, modeling the pyramid in an immersive 3D/VR environment that allowed Jean-Pierre’s work to be effectively communicated to experts and laypersons alike.
To help model and fit-check the robot, Dassault Systèmes provided the powerful SolidWorks 3D software and the expert guidance of Ben Willcocks. The intuitive nature of SolidWorks 3D allowed students and team members to master the software quickly, to share models with each other around the globe, and to directly “print” parts of the robot using the software’s rapid prototyping capabilities. The modeling elements of the software also helped determine the best composition of materials to provide the maximum weight-to-strength ratio to allow Djedi to make the tortuous climb up the irregular geometry of the pyramid shafts.
Mehdi and Richard’s experience with modeling the Great Pyramid would also come in handy when it came time to model, analyze, and present the data culled by the robot crawler. Dassault Systèmes was able to help financially support the project through its <em>Passion for Innovation</em> program, which is specifically set up to help assist projects like Khufu and Djedi by providing funding, software, and technical assistance free of charge.
Through the dedication of the team members, the support of organizations like Leeds and Dassault Systèmes, and the commitment of Dr. Hawass and the Supreme Council of Antiquities, the third mission into the Queen’s Chamber shafts became a reality. As it turns out, the actual robot itself was not prohibitively expensive, thanks to these efforts.
A popular misconception is that the Djedi robots cost a lot of money to produce, this is not true, mainly thanks to the generous contribution of manpower by individuals and organizations. Most funding was spent on travel and accommodation for the various tests and demonstrations.
(Interview with Shaun Whitehead)
Now that we know how the team came together, we will take a look at the Djedi robot itself before diving into the mission and its findings.